Quand on entend le mot « robot », l’imaginaire collectif convoque immédiatement un humanoïde de science-fiction, un droïde de cinéma ou, à l’inverse, un bras articulé étincelant dans une usine automobile. La réalité contemporaine est à la fois plus riche, plus diffuse et beaucoup plus nuancée. La robotique est désormais partout, des champs de betteraves aux blocs opératoires, en passant par les entrepôts logistiques et les aspirateurs qui zigzaguent silencieusement dans nos salons.
Pourtant, derrière cette immense diversité de formes et d’usages, une définition commune et rigoureuse se dessine. Comprendre la robotique, ce n’est pas seulement lister des machines, c’est saisir une logique d’interaction avec le monde physique. C’est comprendre comment la mécanique, l’électronique et l’informatique s’allient pour créer des entités capables d’agir par elles-mêmes.
Qu’est-ce que la robotique ? Définition, but et notions clés
La définition posée en introduction permet de distinguer formellement un robot d’une simple machine automatique. Un lave-linge classique, par exemple, ne perçoit pas son environnement de manière dynamique ; il se contente de suivre un programme temporel prédéfini, indépendamment de ce qui se passe autour de lui. Un robot, en revanche, mesure, ajuste, calcule et, dans une certaine mesure, décide.
La finalité première de la robotique est de soulager l’humain de tâches pénibles, répétitives, dangereuses ou requérant une précision qui dépasse nos capacités physiologiques. On pense naturellement aux chaînes de montage, où les robots soudent ou déplacent des charges lourdes sans fatigue ni baisse de concentration. Mais ce principe est tout aussi vrai pour un robot chirurgical qui filtre les micro-tremblements de la main d’un chirurgien, ou pour un rover qui explore une planète hostile où l’humain ne pourrait survivre. L’objectif fondamental n’est pas de remplacer l’humain à tout prix, mais de l’assister là où ses limites physiques ou cognitives entrent en jeu.
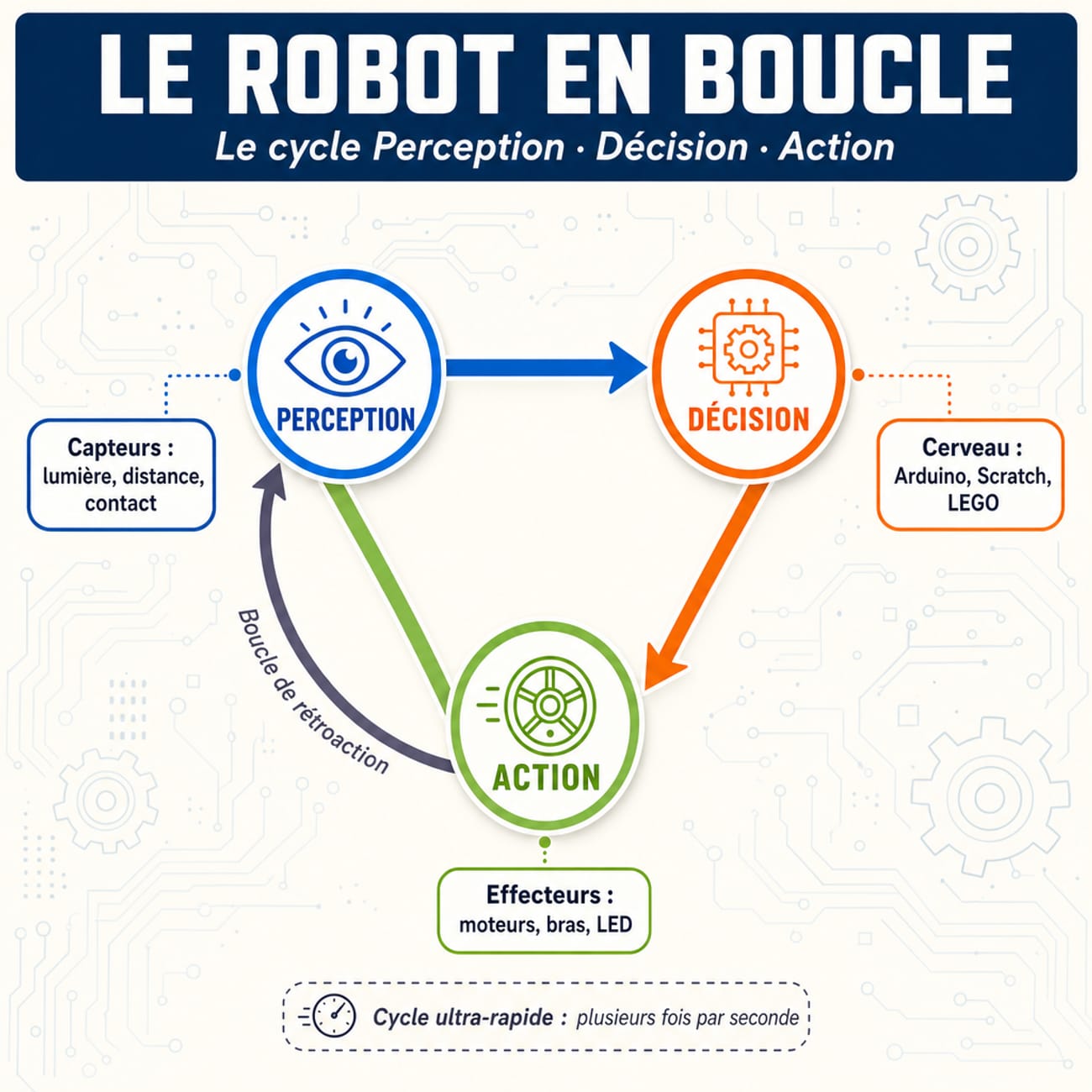
Pour y parvenir, tout système robotique s’appuie sur trois piliers technologiques indissociables :
- Les capteurs (la perception) : Ils collectent des informations sur le monde extérieur et sur l’état interne du robot. On y trouve des caméras, des lidars (télédétection par laser), des capteurs de pression, des thermomètres, des gyroscopes ou encore des microphones. Ils sont les « sens » de la machine.
- L’unité de traitement (la décision) : C’est le cerveau informatique du robot. Des microcontrôleurs ou des processeurs embarqués analysent les données brutes issues des capteurs, font tourner des algorithmes et déterminent l’action à entreprendre selon le but fixé.
- Les effecteurs et actionneurs (l’action) : Ils transforment l’énergie (électrique, pneumatique, hydraulique) en action concrète sur le monde physique. Il s’agit des moteurs, des vérins, des pinces de préhension, des roues, ou même des haut-parleurs et des lasers.
Cette capacité d’adaptation nous amène à la notion d’autonomie, un concept souvent source de confusion dans le grand public. Un robot n’est pas nécessairement doté d’une autonomie totale. Il peut être télé-opéré, comme un robot de déminage piloté à distance par un opérateur humain. Il peut être semi-autonome : on lui indique des coordonnées GPS à atteindre, mais il gère lui-même les micro-ajustements pour éviter les obstacles sur son chemin. La différence clé se situe entre un automate programmé, qui répète inlassablement le même geste calibré dans un environnement parfaitement contrôlé, et un robot autonome capable de s’adapter à un environnement dynamique et imprévisible.
Petite histoire de la robotique : des automates antiques aux robots intelligents
La robotique n’est pas née spontanément avec l’invention de l’informatique au XXe siècle. L’envie viscérale de créer des êtres artificiels et de déléguer le travail physique traverse les civilisations depuis l’Antiquité. Pour bien saisir les enjeux des robots d’aujourd’hui, un détour par l’histoire des automates est indispensable. On y observe la même quête originelle : reproduire le geste, simuler le vivant et maîtriser le temps.
Dès le IIIe siècle avant notre ère, l’ingénieur grec Ctésibius d’Alexandrie conçoit des horloges à eau (clepsydres) d’une grande précision et des mécanismes animés. Quelques siècles plus tard, Héron d’Alexandrie décrit dans ses traités des dispositifs capables de mouvements automatiques, comme l’ouverture spectaculaire des portes d’un temple sous l’effet de la dilatation de l’air chauffé par un feu. Il ne s’agit pas encore de robots au sens moderne, car il n’y a pas de boucle de rétroaction, mais l’idée d’une machine capable d’agir seule est bel et bien semée dans l’esprit des ingénieurs.
Au Moyen Âge et à la Renaissance, les ingénieurs arabes et européens repoussent les limites de la mécanique. Au XIIe siècle, l’érudit Al-Jazari invente des automates musicaux programmables grâce à des systèmes de cames à chevilles. À la fin du XVe siècle, Léonard de Vinci esquisse les plans d’un chevalier mécanique en armure, capable de s’asseoir et de bouger les bras grâce à un complexe réseau de poulies et de câbles.
Il faut ensuite faire un bond jusqu’au XVIIIe siècle pour voir émerger des automates d’une complexité époustouflante, véritables chefs-d’œuvre de l’horlogerie. Jacques de Vaucanson présente en 1738 son célèbre Canard digérateur, capable de boire, de picorer et de simuler la digestion. À la même époque, Pierre Jaquet-Droz et son fils construisent des automates androïdes écrivains, dessinateurs ou musiciens. Ces merveilles ne sont pas programmables informatiquement, mais elles démontrent qu’on peut reproduire des gestes d’une extrême finesse par un enchaînement mécanique rigoureux.
L’époque moderne de la robotique débute véritablement en 1961, dans une fonderie du New Jersey. Unimate, un énorme bras articulé de près de deux tonnes, entre en service sur une chaîne de production de General Motors. Sa mission : saisir et empiler des pièces de métal chauffées à blanc, une tâche aussi dangereuse que répétitive pour un ouvrier. Premier robot industriel de l’histoire, conçu par George Devol et Joseph Engelberger, Unimate ne perçoit pas son environnement. Il suit une trajectoire spatiale préenregistrée point par point. Pourtant, sa robustesse ouvre la voie à l’automatisation massive de l’industrie mondiale.
Dans les décennies qui suivent, l’arrivée des premiers capteurs électroniques puis la miniaturisation des microprocesseurs changent radicalement la donne. Les robots deviennent capables de réagir à des signaux externes. En 1969, l’institut de recherche SRI International dévoile Shakey, le premier robot mobile doté d’une intelligence artificielle rudimentaire, capable de raisonner sur ses actions pour naviguer dans une pièce encombrée. Les années 1990 et 2000 marquent l’essor de la robotique de service, avec l’apparition des premiers aspirateurs robots domestiques, tandis que la robotique chirurgicale fait ses premiers pas décisifs.
La véritable accélération survient au XXIe siècle avec la convergence entre la mécatronique avancée et l’intelligence artificielle. Ce qui était purement mécanique il y a cinquante ans devient progressivement adaptatif, connecté et apprenant. Cette continuité historique est fondamentale : l’automatisation du geste a précédé l’intelligence du geste. Les briques technologiques se sont empilées au fil des siècles.
Les 9 grandes familles de la robotique : un classement en catégories
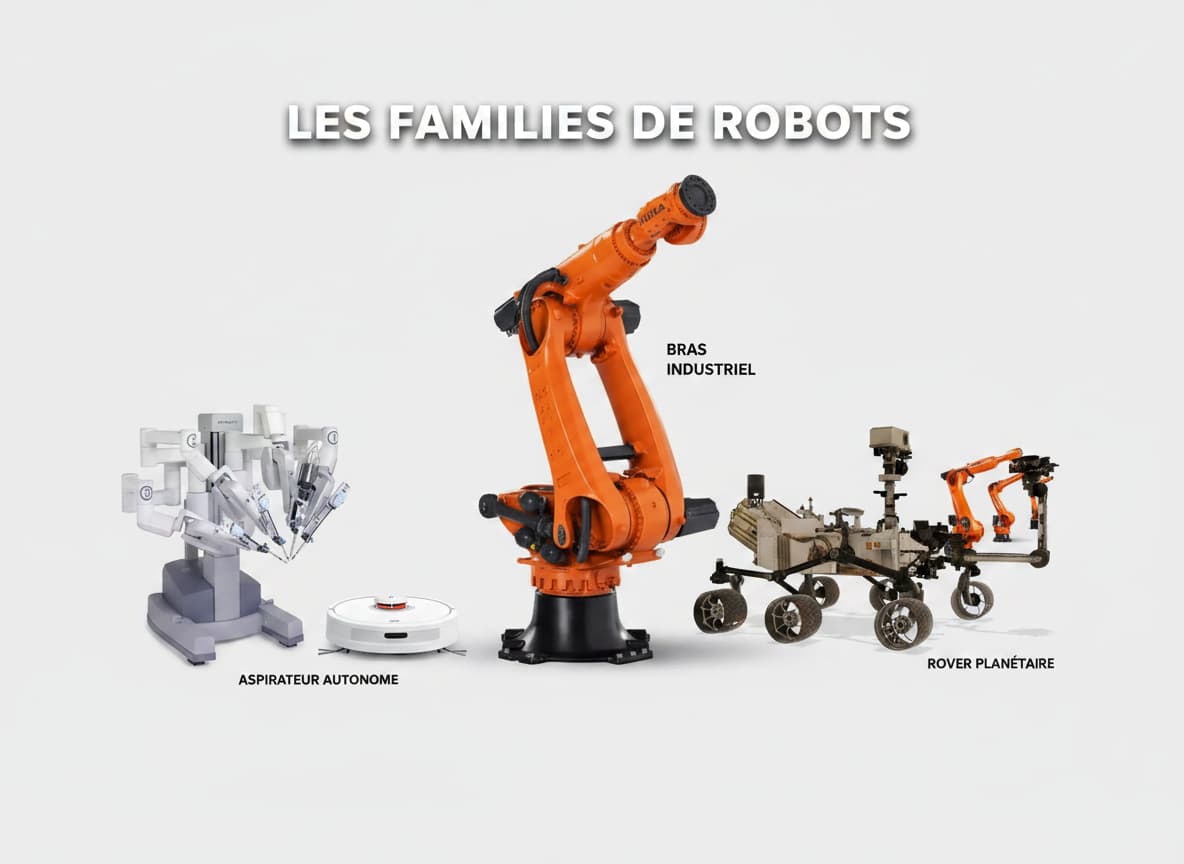
La diversité des robots actuels est telle qu’il devient indispensable de les regrouper par usages et environnements pour bien les appréhender. Au fil des années, une classification en neuf grandes familles s’est imposée dans la littérature spécialisée et pédagogique. Elle a le mérite d’être claire et de couvrir l’essentiel des applications, sans noyer le lecteur dans une taxonomie trop complexe.
1. La robotique industrielle
C’est la doyenne et la plus massive des familles. Elle regroupe les robots utilisés en milieu manufacturier pour des tâches de soudure, de peinture, d’assemblage, d’usinage ou de palettisation. Ces robots sont généralement fixés au sol, extrêmement rapides et d’une précision redoutable (souvent au dixième de millimètre). Le bras articulé à six axes, les robots Delta (pour le tri rapide) ou SCARA restent les icônes de cette famille. On en trouve massivement dans l’automobile, l’agroalimentaire et la fabrication de semi-conducteurs. L’enjeu actuel de cette famille est la flexibilité : passer rapidement d’une série de production à une autre.
2. La robotique médicale
Elle transforme en profondeur la pratique du soin et de la chirurgie. On y classe les robots d’assistance chirurgicale, les systèmes de rééducation neurologique, les prothèses bioniques et les exosquelettes. L’enjeu est triple : accroître la précision du geste médical, favoriser la miniaturisation des interventions pour réduire les traumatismes opératoires, et accélérer la récupération des patients. Les contraintes de certification et de sécurité y sont logiquement les plus drastiques de toute l’industrie robotique.
3. La robotique domestique
C’est celle qui a franchi le seuil de nos maisons et familiarisé le grand public avec les machines autonomes. Elle englobe les aspirateurs robots, les tondeuses autonomes, les nettoyeurs de piscines ou de vitres. La contrainte principale de cette famille est la sécurité absolue et la simplicité d’usage (le fameux « plug and play »), puisque les utilisateurs ne sont pas des techniciens formés. Ces robots doivent opérer dans des environnements non structurés, où des objets traînent au sol et où la configuration des pièces change régulièrement.
4. La robotique de service (professionnelle)
Souvent confondue avec la robotique domestique, cette famille s’en distingue par son usage strictement professionnel ou commercial. Elle désigne les robots qui assistent l’humain dans des environnements publics, logistiques ou tertiaires : accueil en magasin, guidage dans les aéroports, transport de charges dans les entrepôts (AGV/AMR), ou nettoyage de grandes surfaces industrielles. Ces robots visent à optimiser les flux de travail et à décharger le personnel des tâches à faible valeur ajoutée.
5. La robotique militaire et de sécurité
Elle couvre les drones aériens (UAV), les véhicules terrestres sans pilote (UGV), les robots de déminage, de reconnaissance tactique ou de patrouille frontalière. L’objectif premier est d’éloigner le soldat ou le primo-intervenant du danger immédiat. Ce secteur est un moteur puissant de l’innovation technologique (notamment pour la robustesse et la vision nocturne/thermique), mais il suscite des débats éthiques majeurs, particulièrement concernant l’autonomie décisionnelle des systèmes d’armement létaux.
6. La robotique spatiale
Elle opère là où l’humain ne peut pas survivre à long terme : orbite terrestre, surface de la Lune, de Mars et au-delà. Les contraintes de fiabilité, de masse embarquée, de résistance aux radiations cosmiques et aux températures extrêmes en font la branche la plus exigeante de l’ingénierie. De plus, la distance induit des délais de communication (plusieurs minutes pour Mars), ce qui oblige ces robots à posséder un haut degré d’autonomie pour se déplacer et choisir leurs cibles d’analyse géologique sans attendre les ordres de la Terre.
7. La robotique agricole
Elle se développe à une vitesse fulgurante pour répondre aux défis croisés de la productivité, du manque de main-d’œuvre et de la transition écologique. On y trouve des tracteurs à guidage GPS autonome, des robots de traite dans les élevages, des enjambeurs viticoles, ou encore des robots de désherbage mécanique de précision. L’objectif est d’optimiser les rendements tout en réduisant drastiquement l’usage d’intrants chimiques (pesticides, herbicides) grâce à des interventions ciblées au centimètre près.
8. La robotique éducative
C’est la porte d’entrée pédagogique pour des millions d’élèves, d’animateurs et de curieux à travers le monde. Elle regroupe les kits de construction robotique, les micro-robots programmables et les environnements de code visuel par blocs. L’objectif n’est pas la performance industrielle, mais l’apprentissage concret de la logique, de l’algorithmique, de la géométrie et de la résolution de problèmes par essais et erreurs, favorisant le travail collaboratif en classe.
9. La robotique sociale
Elle s’intéresse spécifiquement à l’interaction affective, cognitive et relationnelle entre les humains et des robots conçus pour avoir une apparence ou un comportement engageant. Souvent dotés de capacités de reconnaissance vocale et faciale, ces robots sont testés pour l’accompagnement de personnes âgées isolées, l’accueil en établissement de santé, ou l’assistance pédagogique ciblée (par exemple pour des enfants présentant des troubles du spectre autistique). L’enjeu ici est l’acceptabilité psychologique de la machine.
Il est important de noter que cette classification n’est pas parfaitement étanche. Un robot de récolte agricole peut relever de la robotique de service, et un exosquelette médical partage des technologies avec l’industrie. Il faut la voir comme une grille de lecture pratique plutôt que comme un dogme rigide.
Robotique, automatisation et intelligence artificielle : des notions à démêler
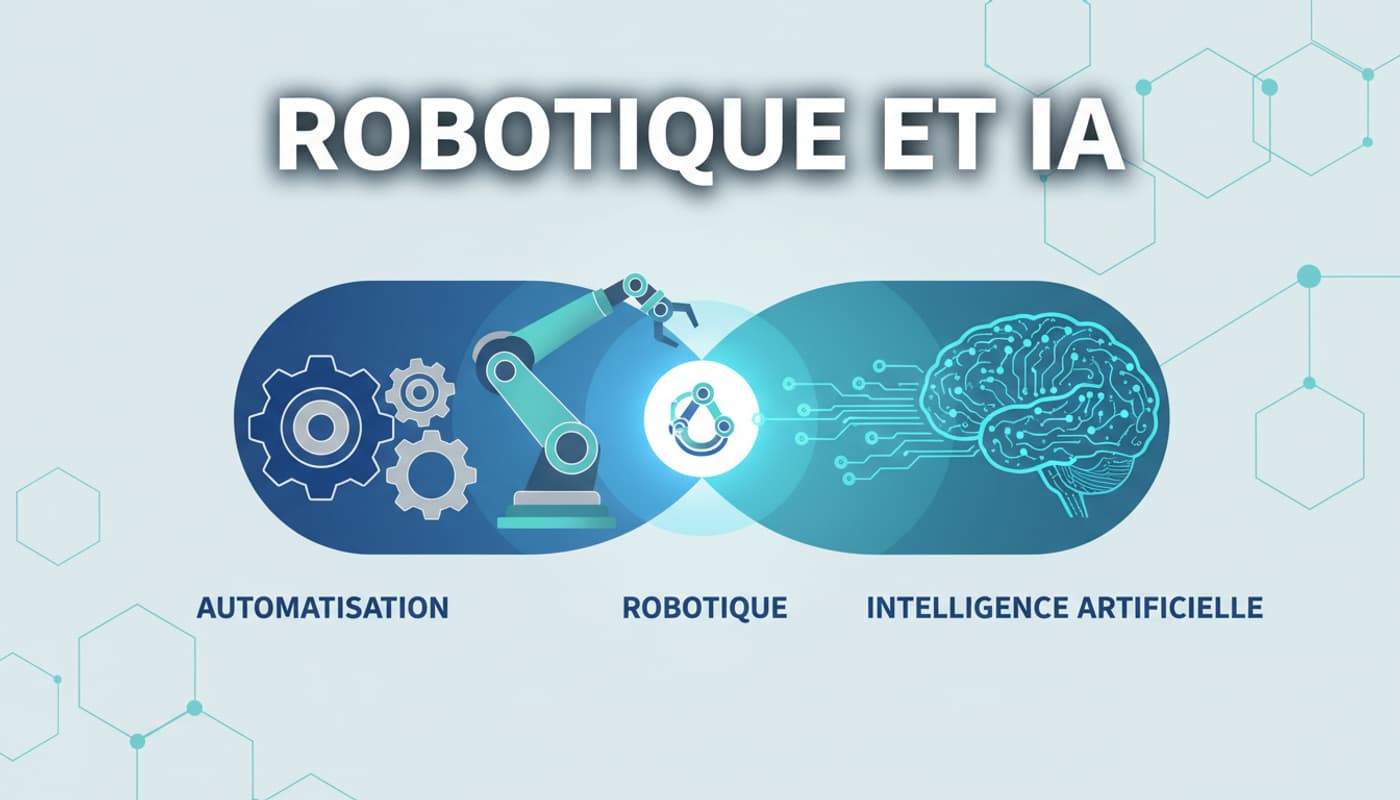
Dans les médias et les discussions courantes, on entend très souvent les termes « automatisation », « robotique » et « intelligence artificielle » employés comme s’ils étaient de parfaits synonymes. Ce n’est absolument pas le cas. Pour poser un regard éclairé sur les technologies actuelles, il est crucial de comprendre leurs frontières et la manière dont elles s’articulent. Ces trois domaines ont chacun leur histoire, leur logique propre, et c’est leur combinaison qui donne naissance aux systèmes les plus spectaculaires d’aujourd’hui.
Voici un tableau comparatif synthétique pour clarifier immédiatement ces distinctions fondamentales :
| Critère d’analyse | Automatisation classique | Robotique (sans IA) | Intelligence Artificielle (IA) |
|---|---|---|---|
| Objectif principal | Exécuter une séquence d’actions prédéfinie sans intervention humaine. | Agir physiquement sur le monde en s’adaptant aux variations de l’environnement. | Imiter, simuler ou dépasser des capacités cognitives humaines (vision, langage). |
| Niveau d’autonomie | Très faible (le programme ne dévie jamais de sa boucle). | Variable (de télé-opérée à autonome face à des obstacles simples). | Élevé (capacité de prise de décision complexe et d’apprentissage). |
| Rôle des capteurs | Basique : détection d’état binaire (ex: capteur de fin de course, présence). | Essentiel : mesure continue pour guider l’action physique en temps réel. | Central : les données massives servent à entraîner et affiner les modèles. |
| Capacité d’adaptation | Nulle : face à l’imprévu, la machine s’arrête ou échoue. | Modérée : s’ajuste en temps réel à des situations physiques prévues par le code. | Forte : le modèle algorithmique évolue et s’améliore avec l’expérience. |
| Exemple concret | Un distributeur automatique de billets ou un portique de lavage auto. | Un bras industriel qui corrige sa soudure grâce à un capteur de distance. | Un algorithme qui génère du texte ou reconnaît des tumeurs sur une radio. |
Après ce repère visuel, analysons comment ces trois strates s’articulent dans la pratique industrielle et quotidienne. L’automatisation est la couche technologique la plus ancienne. Il s’agit de confier à une machine une tâche répétitive autrefois réalisée manuellement, en enchaînant des étapes fixes. Une barrière de péage automatique ou une chaîne d’embouteillage classique relèvent de l’automatisation. Si une bouteille tombe sur le tapis roulant, la machine continue de verser le liquide dans le vide. Il n’y a aucune adaptation à l’imprévu.
La robotique ajoute une dimension physique perceptive et réactive. Le robot ne se contente pas d’un programme temporel figé : il capte, mesure, et ajuste son geste. Une machine de production automatisée devient un robot complet lorsqu’elle possède des capteurs complexes et des actionneurs guidés par une boucle de rétroaction. L’apport décisif est la capacité à interagir avec un monde changeant. Par exemple, un bras robotisé équipé de capteurs de vision industrielle corrigera sa trajectoire de saisie si la pièce sur le tapis roulant est légèrement de travers.
L’intelligence artificielle vient coiffer ces deux couches matérielles en apportant des facultés d’apprentissage, de prédiction et d’interprétation sémantique. Un robot peut excellemment fonctionner sans IA, en suivant des règles mathématiques et physiques programmées en dur (on parle alors d’automatique ou de théorie du contrôle). Mais quand on souhaite qu’il apprenne de ses erreurs passées, qu’il reconnaisse un visage humain parmi une foule, ou qu’il comprenne une instruction vocale ambiguë, on fait appel à l’IA (Machine Learning, Deep Learning).
Un exemple concret, filé sur une même tâche de tri de déchets, permet de saisir cette gradation technologique :
- Niveau 1 (Automatisation) : Un tapis roulant fait avancer les déchets à vitesse constante, et un piston pousse systématiquement les objets tombant dans une goulotte spécifique.
- Niveau 2 (Robotique classique) : Un bras articulé utilise un capteur infrarouge pour détecter la présence d’un objet, calcule ses coordonnées spatiales, le saisit avec précision et le dépose dans un bac. Il s’adapte à la position de l’objet, mais ne sait pas ce qu’il saisit.
- Niveau 3 (Robotique + IA) : Le même bras articulé est couplé à une caméra et un réseau de neurones artificiels. Il analyse l’image en temps réel, distingue une bouteille en plastique PET d’une canette en aluminium écrasée, décide du bac approprié, et apprend au fil des mois à reconnaître de nouveaux emballages. C’est la rencontre aboutie entre la robotique et l’IA.
La confusion se dissipe naturellement si l’on retient cette métaphore simple : l’automatisation fournit le squelette et le muscle basique, la robotique apporte les sens et les réflexes, et l’IA, lorsqu’elle est intégrée, offre un cerveau adaptatif. Dans les systèmes de pointe actuels, ces trois dimensions cohabitent de façon si fluide qu’elles donnent l’illusion d’une technologie unique.
Domaines d’application : où trouve-t-on des robots aujourd’hui ?
Pour sortir de la théorie et atterrir sur des cas d’usage concrets, attardons-nous sur les secteurs économiques et sociaux dans lesquels les robots sont déjà massivement à l’œuvre. Ce panorama démontre à quel point la robotique est passée du statut de curiosité de laboratoire à celui d’infrastructure critique de notre société.
L’industrie manufacturière et la logistique 4.0
Les chaînes de production automobile en sont l’image historique, mais le phénomène a largement débordé ce cadre. Dans l’électronique grand public, des robots de type SCARA placent des micro-composants sur des cartes mères à une vitesse que l’œil humain ne peut suivre. Selon la Fédération Internationale de Robotique (IFR), le parc mondial de robots industriels opérationnels dépasse allègrement les 3 millions d’unités, avec une densité record en Corée du Sud, à Singapour et en Allemagne. Parallèlement, la logistique a été révolutionnée par le e-commerce. Des flottes de milliers de robots mobiles autonomes (AMR) sillonnent les immenses entrepôts d’Amazon ou d’Alibaba, soulevant des étagères entières pour les apporter aux préparateurs de commandes, optimisant ainsi les flux de marchandises à une échelle inédite.
La santé et le parcours de soin
Le robot chirurgical Da Vinci (développé par Intuitive Surgical) est le porte-étendard de ce secteur, utilisé quotidiennement pour des prostatectomies ou des chirurgies cardiaques mini-invasives. Mais la robotique médicale irrigue tout le parcours de soin. Les robots de rééducation, comme les exosquelettes de marche, permettent à des patients paraplégiques ou victimes d’un AVC de répéter des mouvements fonctionnels avec un soutien moteur ultra-précis, stimulant la plasticité cérébrale. En logistique hospitalière, des robots autonomes naviguent dans les couloirs pour livrer des médicaments sécurisés, des plateaux-repas ou du linge propre, libérant un temps précieux pour le personnel soignant qui peut se recentrer sur le contact humain.
L’exploration des milieux extrêmes
Humidité écrasante, pressions abyssales, températures extrêmes, absence d’oxygène, radioactivité mortelle : les milieux hostiles sont le terrain d’excellence de la robotique d’exploration. Le rover Perseverance, qui arpente la surface de Mars à la recherche de biosignatures, est un laboratoire de chimie ambulant. Sur Terre, des robots sous-marins télé-opérés (ROV) ou autonomes (AUV) inspectent les câbles de télécommunication transatlantiques, soudent des pipelines à 3000 mètres de profondeur ou explorent des épaves historiques. Dans le secteur du nucléaire, des robots spécialisés durcis contre les radiations sont envoyés pour démanteler des centrales vieillissantes ou intervenir dans des zones hautement contaminées, comme ce fut le cas à Fukushima ou Tchernobyl.
L’agriculture de précision
Face à la nécessité de nourrir une population mondiale croissante tout en réduisant l’impact environnemental, l’agriculture opère sa mue robotique. Des robots enjambeurs autonomes, guidés par RTK (un GPS de très haute précision), parcourent les champs pour biner mécaniquement les mauvaises herbes au plus près des cultures, éliminant le besoin d’herbicides chimiques. Dans les vergers, des bras robotisés équipés de caméras analysent la maturité des fruits et les cueillent délicatement sans les meurtrir. Dans l’élevage, les robots de traite permettent aux vaches de se faire traire à leur propre rythme, améliorant le bien-être animal tout en fournissant à l’éleveur des données de santé en temps réel sur chaque bête.
Quels métiers dans la robotique ?
La robotique est un secteur économique en très forte croissance, mais il n’est pas exclusivement réservé aux ingénieurs bardés de diplômes théoriques. Les besoins en compétences couvrent l’intégralité de la chaîne de valeur, de la conception initiale à la maintenance sur site, en passant par la programmation et l’intégration. Voici les principaux métiers qui structurent cette filière d’avenir.
- Ingénieur en robotique (conception et R&D) : C’est le métier d’architecte du système. Il conçoit le robot dans sa globalité en combinant la mécanique, l’électronique embarquée et l’informatique. Sa mission consiste à spécifier la puissance des moteurs, choisir les capteurs adéquats, dimensionner la structure physique, et assurer la cohérence de tous les sous-ensembles. Ce poste requiert généralement un niveau bac+5 (école d’ingénieurs ou master universitaire spécialisé en mécatronique).
- Technicien de maintenance robotique : Profil indispensable et très recherché dans l’industrie, ce technicien intervient directement sur le terrain pour diagnostiquer une panne complexe, calibrer un capteur déréglé, ou remplacer un effecteur usé. Le métier exige une solide culture technique polyvalente et une grande réactivité. Il est accessible à partir d’un bac+2 ou bac+3 (BTS, BUT en maintenance des systèmes ou en génie électrique).
- Développeur / Programmeur robotique : Il écrit le code qui donne vie à la machine. Cela va de la programmation des trajectoires de soudage à l’implémentation d’algorithmes de vision par ordinateur, en passant par la gestion des interfaces utilisateur. La maîtrise des langages C++, Python et des environnements de développement spécifiques comme ROS (Robot Operating System) est incontournable.
- Intégrateur robotique industriel : Chargé de la mise en service concrète, il installe les robots dans l’usine du client, les connecte aux autres machines de la ligne de production, paramètre les réseaux de communication industriels et forme les opérateurs finaux. L’intégration exige une excellente connaissance des normes de sécurité (directives machines) et une forte appétence pour le travail de terrain.
- Chercheur en robotique : Au sein de laboratoires publics (CNRS, Inria, universités) ou de centres de R&D privés, il explore les ruptures technologiques de demain : préhension d’objets déformables, navigation en milieu très dense, ou matériaux intelligents. Ce métier repose sur l’obtention d’une thèse de doctorat (bac+8).
- Ergonome / Designer d’interaction (HRI) : Un métier émergent mais crucial. Ce spécialiste étudie et conçoit la manière dont l’humain et le robot interagissent (Human-Robot Interaction). Il s’assure que les interfaces de commande sont intuitives, que les mouvements du robot sont prévisibles et ne génèrent pas d’anxiété chez l’utilisateur, particulièrement dans la robotique médicale ou de service.
Le secteur recrute activement à tous les niveaux de qualification. Les évolutions de carrière y sont fréquentes : un technicien de maintenance expérimenté peut tout à fait évoluer vers un poste d’intégrateur ou de chef de projet. L’ouverture récente de formations courtes, de bachelors spécialisés et de certifications professionnelles élargit considérablement les voies d’accès à ces métiers passionnants.
Enjeux contemporains et perspectives : quelle place pour la robotique demain ?
Parler de robotique aujourd’hui, c’est inévitablement regarder les questions sociétales qu’elle soulève et les directions technologiques qu’elle emprunte. Aucune technologie de cette ampleur n’est neutre. L’équilibre entre les promesses d’amélioration des conditions de vie et la vigilance éthique est au cœur des débats contemporains.
L’impact sur l’emploi et l’économie. L’arrivée massive des robots dans l’industrie et les services ravive régulièrement la crainte de suppressions d’emplois. La réalité macroéconomique est plus nuancée. Si des tâches répétitives et physiquement usantes sont effectivement automatisées, de nouveaux métiers se créent autour de la conception, de la maintenance, de la programmation et de la supervision de ces flottes de robots. Les pays ayant la plus forte densité de robots industriels (Corée du Sud, Allemagne, Japon) affichent paradoxalement des taux de chômage industriel parmi les plus bas. Le véritable défi politique et social réside dans la formation continue et l’accompagnement des travailleurs vers ces nouvelles compétences.
Les questions éthiques et juridiques. Qui est responsable lorsqu’un robot autonome cause un dommage matériel ou corporel ? Le fabricant du matériel, le développeur de l’algorithme, le propriétaire de la machine, ou l’utilisateur final ? Ces interrogations juridiques ne sont plus de la science-fiction. Dès qu’un véhicule autonome ou un drone de livraison prend une décision de navigation sans validation humaine directe, la chaîne de responsabilité devient complexe à établir. S’y ajoutent les débats cruciaux sur les biais algorithmiques et la protection de la vie privée, particulièrement pour les robots domestiques bardés de caméras et de micros connectés au cloud.
La robotique molle (Soft Robotics) et bio-inspirée. Sur le plan de la recherche fondamentale, la robotique s’éloigne des structures métalliques rigides pour explorer des matériaux souples (silicones, polymères électroactifs). Inspirés par la biologie (la trompe de l’éléphant, les tentacules de la pieuvre), ces robots mous révolutionnent la préhension d’objets fragiles (fruits, organes humains) et garantissent une interaction physique sans aucun danger pour l’humain. Parallèlement, la robotique en essaim s’inspire du comportement des insectes sociaux (fourmis, abeilles) pour faire coopérer des dizaines de petits robots simples afin d’accomplir une tâche complexe, comme la cartographie d’une zone sinistrée.
L’enjeu environnemental. La robotique est à double tranchant face à la crise écologique. D’un côté, la fabrication de millions de robots et de batteries nécessite l’extraction de métaux rares et génère une empreinte carbone significative. De l’autre, la robotique est un levier majeur de la transition écologique : tri automatisé des déchets pour un meilleur recyclage, agriculture de précision réduisant la pollution des sols, et optimisation énergétique des processus industriels. Le bilan net dépendra des choix de conception (écoconception, réparabilité) des prochaines années.
Foire aux questions : l’essentiel sur la robotique
C’est quoi exactement la robotique ?
La robotique est le domaine scientifique et technique dédié à la conception, la fabrication et l’utilisation de machines automatiques appelées robots. Ces systèmes combinent la mécanique, l’électronique et l’informatique pour percevoir leur environnement via des capteurs, analyser la situation, et agir physiquement grâce à des effecteurs, de manière autonome ou semi-autonome.
Quel est le but principal de la robotique ?
Son but fondamental est d’assister, de protéger ou de suppléer l’humain dans des tâches qui sont pénibles, répétitives, dangereuses ou qui requièrent une précision extrême. Elle vise à augmenter la sécurité au travail, améliorer la productivité industrielle, et repousser les limites de l’exploration scientifique et médicale.
Quelles sont les 9 grandes familles de la robotique ?
On classe généralement les robots en neuf catégories selon leur domaine d’usage : la robotique industrielle, médicale, domestique, de service professionnel, militaire/sécurité, spatiale, agricole, éducative et sociale. Chaque famille répond à des contraintes techniques et réglementaires spécifiques.
Quels sont les métiers liés à la robotique ?
Le secteur offre une grande variété de carrières : ingénieur en conception mécatronique, technicien de maintenance industrielle, développeur logiciel (programmation d’algorithmes et d’IA), chercheur en laboratoire, ergonome des interactions humain-machine, ou encore intégrateur de systèmes sur sites industriels.
Quelle est la différence entre robotique et automatisation ?
L’automatisation consiste à faire exécuter à une machine un programme fixe et répétitif, sans aucune capacité d’adaptation à l’imprévu. La robotique va plus loin en intégrant des capteurs qui permettent à la machine de percevoir les variations de son environnement et d’ajuster ses mouvements en temps réel pour réussir sa tâche.
La robotique utilise-t-elle toujours l’intelligence artificielle ?
Non, pas systématiquement. De très nombreux robots industriels fonctionnent parfaitement avec des règles mathématiques et physiques programmées de manière classique, sans aucune IA. L’intelligence artificielle est ajoutée uniquement lorsqu’on souhaite que le robot apprenne de son expérience, reconnaisse des objets complexes par vision, ou prenne des décisions face à des situations inédites.