Un robot qui marche, qui danse et que l’on retrouve de plus en plus dans nos salles de classe : Poppy fascine autant qu’il interroge. Si vous êtes enseignant, animateur ou parent curieux, vous vous demandez sûrement ce qui se cache derrière cette silhouette articulée. Découvrons ensemble sa définition, son fonctionnement technique et ses véritables usages pédagogiques sur le terrain.
Qu’est-ce que Poppy le robot ? Origine et philosophie du projet

Dès le premier regard, Poppy le robot intrigue par son allure à la fois mécanique et accessible. Il s’agit d’une plateforme robotique open-source, pensée dès le départ par les équipes de l’Inria (Institut national de recherche en sciences et technologies du numérique) et de Flower Labs. L’objectif initial était clair : créer un outil dédié à la recherche sur l’intelligence artificielle et à la robotique pédagogique, sans les contraintes des systèmes propriétaires fermés.
Contrairement à une idée reçue tenace, son nom ne fait aucune référence à une poupée ou au pavot. « Poppy » signifie « coquelicot » en anglais. Ce choix poétique illustre parfaitement la philosophie fondamentale du projet. À l’image des innombrables variétés de cette fleur sauvage qui pousse librement, la plateforme a été conçue pour encourager une immense diversité de formes, de modifications et d’usages chez ses utilisateurs.
Pour bien comprendre l’évolution de ce projet technologique français, voici les étapes clés de son développement :
- 2012 : Lancement du projet au sein de l’équipe Flowers de l’Inria Bordeaux, sous la direction de chercheurs spécialisés en robotique développementale.
- 2014 : Présentation officielle de la première version du robot au grand public, marquant le début de la communauté open-source autour du projet.
- 2017 : Forte médiatisation et déploiement massif dans les établissements scolaires français via des kits éducatifs (comme le kit Ergo Jr).
- Aujourd’hui : Développement continu par la communauté de nouvelles versions adaptées à différents budgets, intégrant des cartes électroniques modernes comme la Raspberry Pi.
Comment fonctionne Poppy ? Un robot ouvert, modulaire et imprimable en 3D
Une architecture logicielle 100 % open-source
La véritable force de Poppy le robot réside dans son accessibilité logicielle absolue. L’intégralité de son code, de son firmware de contrôle à ses bibliothèques de haut niveau en Python, est librement accessible sur des plateformes comme GitHub. La communauté peut ainsi auditer, modifier et améliorer le comportement de la machine en permanence.
Pour les enseignants et les débutants, la barrière à l’entrée est volontairement abaissée. Il n’est pas nécessaire de maîtriser des lignes de code complexes pour animer la structure. Le système se programme visuellement grâce à des interfaces par blocs comme Snap! ou Scratch. Cette approche permet de valider des concepts d’algorithmique (boucles, conditions, variables) de façon très intuitive avant de basculer vers des langages textuels plus avancés.
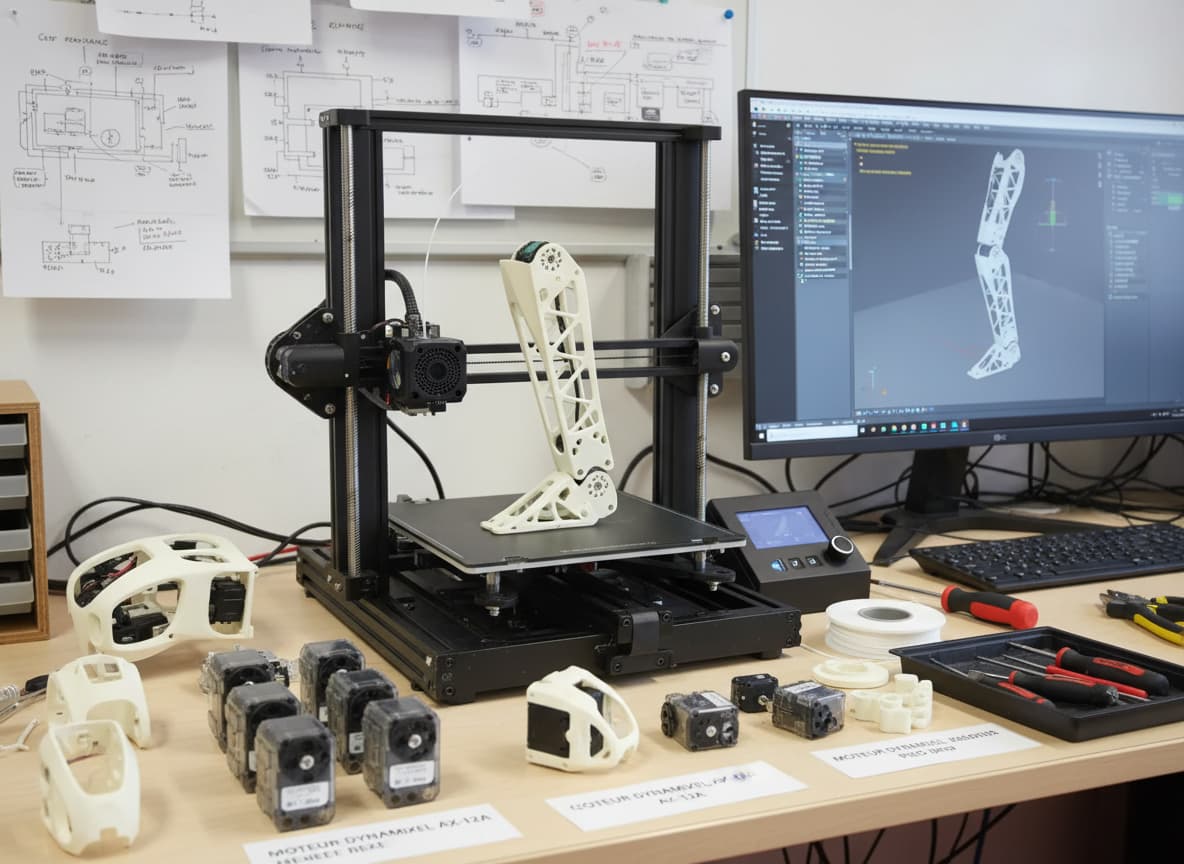
L’impression 3D pour personnaliser chaque pièce
L’aspect matériel de ce robot est tout aussi fascinant. Les pièces formant le squelette de Poppy sont optimisées pour être fabriquées sur des imprimantes 3D à dépôt de fil fondu (FDM), le standard grand public. Tous les fichiers de modélisation (au format STL) sont disponibles gratuitement en ligne.
Concrètement, si un élève casse une pièce lors d’une manipulation un peu brusque, il suffit de relancer une impression. Cette conception entièrement personnalisable permet surtout de modifier le design du robot selon les besoins d’un projet : modéliser des pinces spécifiques, allonger les segments des jambes pour modifier le centre de gravité, ou lui créer des capots de protection sur mesure.
Des servomoteurs Dynamixel pour des mouvements précis
Pour s’animer avec fluidité, la structure s’appuie sur des actionneurs haut de gamme : les servomoteurs Dynamixel. Contrairement à de simples moteurs continus, ces composants intelligents gèrent la motorisation des articulations avec une précision millimétrique. Ils intègrent leur propre microcontrôleur et communiquent en réseau.
Ces servomoteurs fournissent un retour d’information constant sur leur position exacte, leur vitesse de rotation, la charge appliquée et même leur température interne. Ces données sont précieuses pour analyser les mouvements en classe ou en laboratoire. Grâce à cette standardisation des connexions, la structure est totalement modulable : on peut ajouter un bras supplémentaire ou modifier la configuration de la colonne vertébrale en quelques minutes.
Poppy dans la classe et au labo : quels usages concrets ?

En milieu scolaire : enseigner la programmation et la mécanique
Dans les collèges et lycées, la présence d’un robot humanoïde transforme radicalement l’apprentissage des sciences de l’ingénieur et de l’informatique. Lors d’ateliers pratiques, les élèves utilisent Python pour programmer des séquences de marche, d’équilibre ou d’évitement d’obstacles. Le droit à l’erreur devient formateur : un mauvais code se traduit immédiatement par une chute du robot, obligeant l’élève à déboguer sa logique.
C’est également un formidable levier pour des projets interdisciplinaires. Dans l’académie de Bordeaux, des classes de collège ont couplé une carte micro:bit à un bras articulé de la gamme Poppy (le modèle Ergo Jr). L’objectif était de modéliser le fonctionnement biomécanique d’une articulation humaine. Ce projet a permis de croiser concrètement le programme de SVT (les muscles antagonistes), de technologie (la transmission de mouvement) et d’arts plastiques (le design de la prothèse).
Dans la recherche en robotique et intelligence artificielle
Au-delà du cadre scolaire, Poppy reste un outil scientifique de pointe. Dans les laboratoires universitaires, il sert de plateforme d’expérimentation agile pour explorer la locomotion bipède, un défi technique majeur en robotique. Les chercheurs l’utilisent pour tester des algorithmes d’apprentissage par renforcement, où le robot apprend à marcher seul par essais et erreurs.
En art et en médiation scientifique
La dimension esthétique, couplée à la fluidité de ses mouvements, inspire largement le monde de l’art contemporain. On retrouve régulièrement cette plateforme dans des FabLabs ou des musées pour démystifier le fonctionnement des algorithmes auprès du grand public.
Un exemple marquant de cet usage artistique est la pièce de danse contemporaine « School of Moon » du chorégraphe Eric Minh Cuong Castaing. Dans cette performance, des robots Poppy interagissent sur scène avec des enfants danseurs. Les servomoteurs sont programmés pour explorer de nouvelles interactions corporelles, questionnant notre rapport à l’empathie artificielle et à la présence mécanique.
Poppy et Pepper : deux robots à ne pas confondre
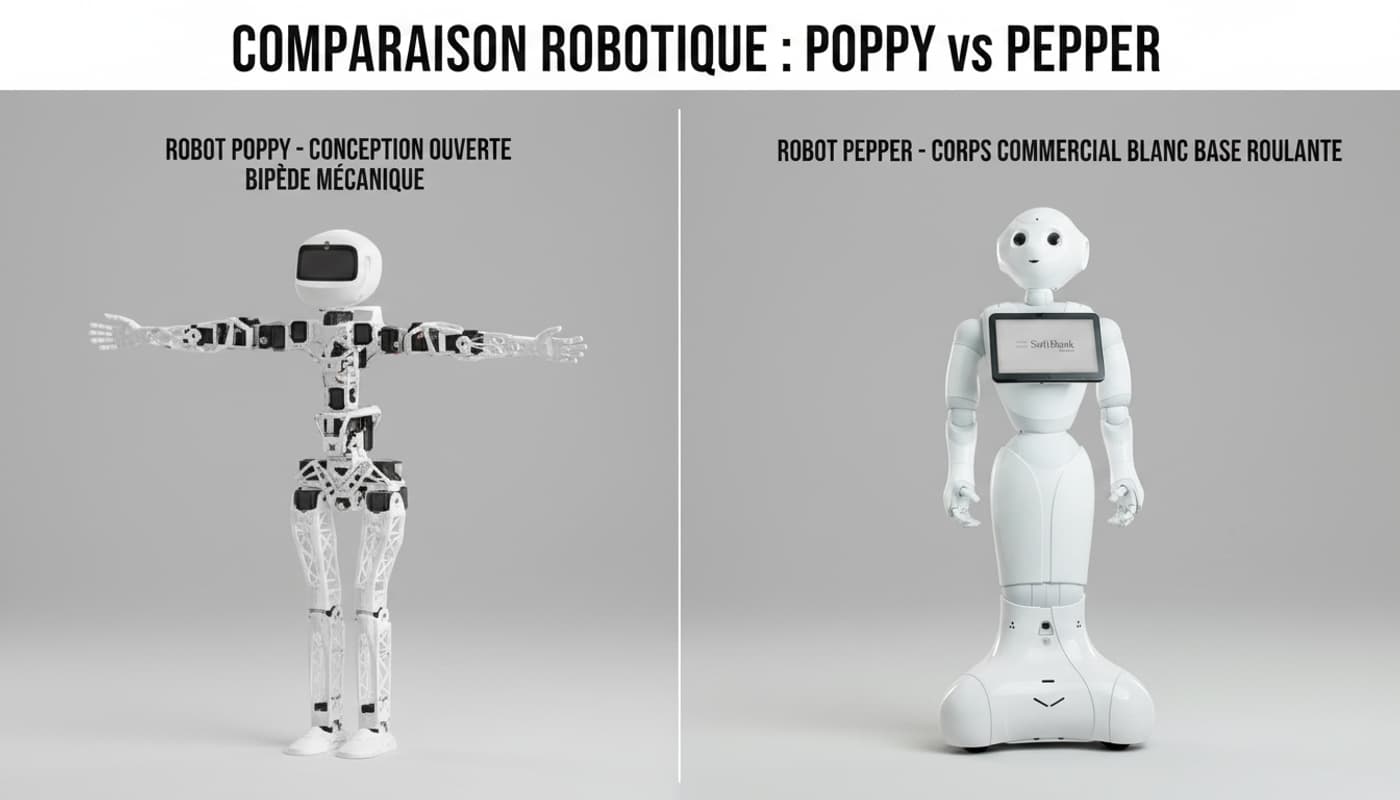
Il est très fréquent d’entendre des confusions entre Poppy le robot et Pepper. Cette méprise s’explique facilement : tous deux portent des prénoms anglophones commençant par la lettre « P », partagent une apparence de robot humanoïde et ont des racines françaises (Pepper ayant été conçu par Aldebaran Robotics avant son rachat).
Pourtant, leurs philosophies et leurs usages sont radicalement opposés. La différence fondamentale réside dans leur vocation et leur écosystème. Poppy est un projet de recherche ouvert, pensé pour l’expérimentation éducative, que chacun peut s’approprier, démonter et modifier à l’envi. À l’inverse, Pepper est un produit purement commercial, conçu par SoftBank Robotics pour l’accueil du public en entreprise ou en magasin, fonctionnant sur une architecture logicielle et matérielle totalement fermée.
Voici un tableau comparatif pour identifier immédiatement leurs différences :
| Caractéristique | Poppy le robot | Pepper |
|---|---|---|
| Origine du projet | Inria (France) | SoftBank Robotics (Japon/France) |
| Objectif principal | Recherche, éducation et bidouille | Accueil client et marketing |
| Architecture | Open-source (100 % libre) | Propriétaire et verrouillée |
| Personnalisation | Totale (Impression 3D des pièces) | Design fixe, coque scellée |
| Mode de déplacement | Marche bipède (jambes articulées) | Déplacement glissant sur roues omnidirectionnelles |
Foire aux questions : l’essentiel à retenir
Pour synthétiser les informations techniques et historiques, voici les réponses directes aux interrogations les plus fréquentes concernant ce projet robotique.
Qu’est-ce que veut dire le nom Poppy ?
Le nom vient du mot anglais signifiant « coquelicot ». Les créateurs de l’Inria ont choisi ce terme botanique pour évoquer la diversité des formes et des possibilités d’évolution de la machine, à l’image des nombreuses variétés de cette fleur. Il n’y a aucun rapport avec le pavot ou avec un prénom humain.
Quelle est l’histoire de sa création ?
Le projet est né en 2012 au sein de l’équipe Flowers de l’Inria à Bordeaux, sous la direction du chercheur Pierre-Yves Oudeyer. La première version fonctionnelle a été dévoilée en 2014. Le développement a ensuite été soutenu par la structure Flower Labs pour faciliter la diffusion des kits dans les collèges, les lycées et les laboratoires de recherche.
Poppy était-elle une vraie humaine ?
Non, il n’a jamais été une vraie personne. C’est exclusivement le nom d’une plateforme robotique. La confusion vient souvent du fait que « Poppy » est un prénom féminin très courant dans les pays anglo-saxons, ou d’amalgames avec des légendes urbaines sur internet. La machine n’a aucun lien avec un être humain réel ou fictif.
S’agit-il vraiment d’un projet open-source ?
Oui, c’est l’essence même du projet. L’intégralité des plans de conception mécanique, des fichiers d’impression 3D, des schémas électroniques et du code logiciel est publiée sous licence libre. N’importe quel utilisateur peut télécharger les sources, les modifier pour son propre usage et partager ses améliorations avec la communauté.
Peut-on imprimer le robot chez soi ?
Absolument. Toutes les pièces structurelles du squelette sont modélisées pour être imprimées en 3D sur des machines FDM grand public. Les fichiers STL sont en libre accès. Si l’impression du plastique est très abordable, il faut toutefois prévoir un budget plus conséquent pour l’achat de l’électronique et des servomoteurs Dynamixel nécessaires à l’assemblage final.
À quoi sert-il concrètement dans l’éducation ?
Il sert de support physique pour enseigner la programmation (Scratch, Python), la mécanique et les sciences du numérique. Voir un algorithme se traduire par un mouvement physique réel capte l’attention des élèves bien plus efficacement qu’une simulation sur écran. Il favorise l’apprentissage par l’erreur et le travail collaboratif autour de projets concrets.